Клубника
Ср 20 мая 2015 г., 18:23
Что такое Game of Life?
Ну, вчера работал над этой маленькой игрой.
Его в основном Conways Game of Life на сетке 50x33, в которой банкомат. Должен быть предопределен в эскизе.
Вывод виден на экране ILI9341, но пусть я тоже попробую с OLED.
Это не большой проект, но все же немного смешно Собираюсь добавить немного возможности ввода или прикосновения в эти выходные.
Собираюсь добавить немного возможности ввода или прикосновения в эти выходные.
Скачать (puush)
Предварительно загружен с помощью планера gospers ^^
Multi для мультипликатора, который масштабирует сетку. Maxy и Maxx обозначают размеры сетки (что также может быть изменено)
Я пытался с 80x80, но это все еще "медленно". 100x100 не сработал, 4000 баллов слишком большие для оперативной памяти (была ошибкой). Одним из способов будет спасение сетки на внешний EEPROM.
~ Солома
Ну, вчера работал над этой маленькой игрой.
Его в основном Conways Game of Life на сетке 50x33, в которой банкомат. Должен быть предопределен в эскизе.
Вывод виден на экране ILI9341, но пусть я тоже попробую с OLED.
Это не большой проект, но все же немного смешно
Скачать (puush)
Предварительно загружен с помощью планера gospers ^^
Multi для мультипликатора, который масштабирует сетку. Maxy и Maxx обозначают размеры сетки (что также может быть изменено)
Я пытался с 80x80, но это все еще "медленно". 100x100 не сработал, 4000 баллов слишком большие для оперативной памяти (была ошибкой). Одним из способов будет спасение сетки на внешний EEPROM.
~ Солома
Paulrb
Ср 24 июня 2015 г., 22:32
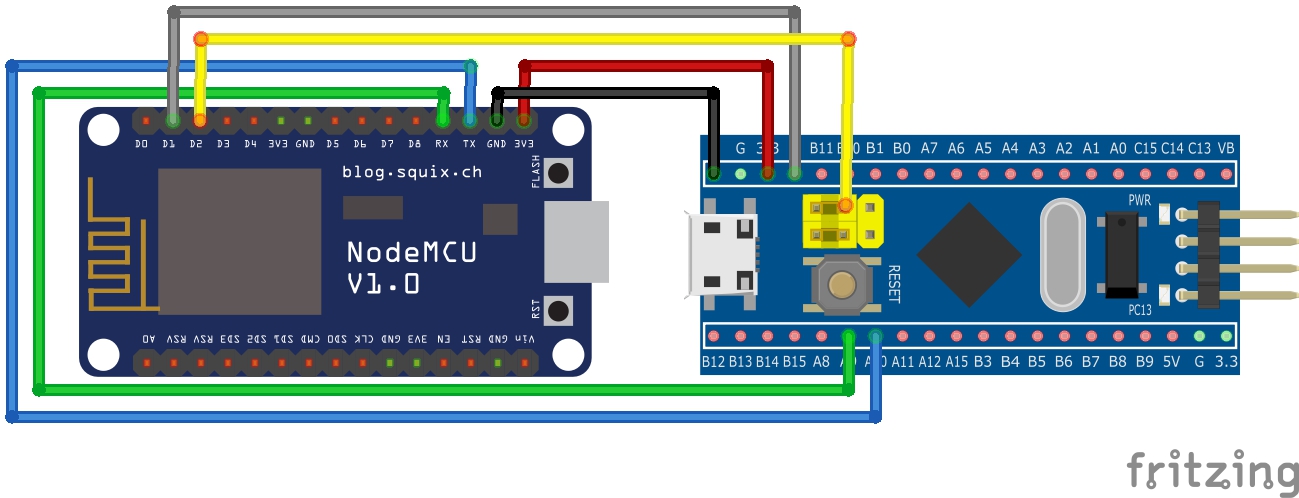
Привет, солома. Игра в жизнь - одна из моих навязчивости. Здесь Является ли моя попытка использовать OLED, отображающий голлер Gosper's Glider на сетке 128x64, работающего на Maple Mini Clone. Это довольно яростно! Около 580 поколений в секунду.
Память не является проблемой, если вы храните свою сетку ячеек, упакованных в биты:
Память не является проблемой, если вы храните свою сетку ячеек, упакованных в биты:
Sketch uses 14,788 bytes (13%) of program storage space. Maximum is 110,592 bytes.
Global variables use 4,256 bytes of dynamic memory.Paulrb
Sun 28 июня 2015 г., 17:29
Хорошо, я получил сетку 256x256. Окно 128x64, предоставленное OLED -экраном, можно прокрутить, используя мини -джойстик.
Видео
Видео
// Conway's Game Of Life 256x256
// PaulRB
// Jun 2015
#include
//Pins controlling SSD1306 Graphic OLED
#define OLED_DC 1
#define OLED_CS 0
#define OLED_RESET 2
#define OLED_COLS 128
#define OLED_ROWS 8
#define MATRIX_COLS 256
#define MATRIX_ROWS 32
union MatrixData {
unsigned long long l[MATRIX_ROWS/8];
byte b[MATRIX_ROWS];
};
#define SW_U 17
#define SW_D 20
#define SW_L 18
#define SW_R 16
#define SW_C 19
int scrollHorz = 0;
int scrollVert = 0;
MatrixData Matrix[MATRIX_COLS+1]; // Cell data in ram
void setup() {
pinMode(OLED_DC, OUTPUT);
pinMode(OLED_CS, OUTPUT);
pinMode(OLED_RESET, OUTPUT);
SPI.begin();
SPI.setBitOrder(MSBFIRST); // Set the SPI bit order
SPI.setDataMode(SPI_MODE0); //Set the SPI data mode 0
SPI.setClockDivider(SPI_CLOCK_DIV2); // 2.25 MHz
digitalWrite(OLED_RESET, HIGH);
delay(1);
digitalWrite(OLED_RESET, LOW);
delay(10);
digitalWrite(OLED_RESET, HIGH);
digitalWrite(OLED_DC, LOW);
digitalWrite(OLED_CS, LOW);
SPI.transfer(0xAE); // Display off
SPI.transfer(0xD5); // Set display clock divider
SPI.transfer(0x80);
SPI.transfer(0xA8); // Set multiplex
SPI.transfer(0x3F);
SPI.transfer(0xD3); // Set display offset
SPI.transfer(0x00);
SPI.transfer(0x40); // Set start line to zero
SPI.transfer(0x8D); // Set charge pump
SPI.transfer(0x14);
SPI.transfer(0x20); // Set memory mode
SPI.transfer(0x00);
SPI.transfer(0xA0 | 0x1); // Set segment remapping
SPI.transfer(0xC8); // Set command Scan decode
SPI.transfer(0xDA); // Set Comm pins
SPI.transfer(0x12);
SPI.transfer(0x81); // Set contrast
SPI.transfer(0xCF);
SPI.transfer(0xd9); // Set precharge
SPI.transfer(0xF1);
SPI.transfer(0xDB); // Set Vcom detect
SPI.transfer(0x40);
SPI.transfer(0xA4); // Allow display resume
SPI.transfer(0xA6); // Set normal display
SPI.transfer(0xAF); // Display On
digitalWrite(OLED_CS, HIGH);
//R-pentomino
//Matrix[64].l[4] = 0b0000010;
//Matrix[65].l[4] = 0b0000111;
//Matrix[66].l[4] = 0b0000100;
//Gosper's Glider Gun
//Matrix[64].l[4] = 0b00000000000000000000000000010000000000000000000000;
//Matrix[65].l[4] = 0b00000000000000000000000001010000000000000000000000;
//Matrix[66].l[4] = 0b00000000000000011000000110000000000001100000000000;
//Matrix[67].l[4] = 0b00000000000000100010000110000000000001100000000000;
//Matrix[68].l[4] = 0b00011000000001000001000110000000000000000000000000;
//Matrix[69].l[4] = 0b00011000000001000101100001010000000000000000000000;
//Matrix[70].l[4] = 0b00000000000001000001000000010000000000000000000000;
//Matrix[71].l[4] = 0b00000000000000100010000000000000000000000000000000;
//Matrix[72].l[4] = 0b00000000000000011000000000000000000000000000000000;
randomiseMatrix();
outputMatrix();
Serial.begin(115200);
pinMode(SW_U, INPUT_PULLUP);
pinMode(SW_D, INPUT_PULLUP);
pinMode(SW_L, INPUT_PULLUP);
pinMode(SW_R, INPUT_PULLUP);
pinMode(SW_C, INPUT_PULLUP);
}
void loop() {
unsigned long start = millis();
for (int i=0; i<1000; i++) {
generateMatrix();
outputMatrix();
}
//Serial.print("Gens/s:"); Serial.println(1000000UL/(millis() - start));
}
void outputMatrix() {
digitalWrite(OLED_DC, LOW); //Command mode
digitalWrite(OLED_CS, LOW); //Enable display on SPI bus
SPI.transfer(0x21); // Set column address
SPI.transfer(0);
SPI.transfer(OLED_COLS-1);
SPI.transfer(0x22); // Set page address
SPI.transfer(0);
SPI.transfer(OLED_ROWS-1);
digitalWrite(OLED_CS, HIGH); //Disable display on SPI bus
digitalWrite(OLED_DC, HIGH); // Data mode
digitalWrite(OLED_CS, LOW); //Enable display on SPI bus
if (digitalRead(SW_L) == LOW && scrollHorz < (MATRIX_COLS - OLED_COLS)) scrollHorz++;
if (digitalRead(SW_R) == LOW && scrollHorz > 0) scrollHorz--;
if (digitalRead(SW_U) == LOW && scrollVert < ((MATRIX_ROWS - OLED_ROWS)<<3)) scrollVert++;
if (digitalRead(SW_D) == LOW && scrollVert > 0) scrollVert--;
//Send matrix data for display on OLED
for (int col = 0; col < OLED_ROWS; col++) {
int colScrolled = col + (scrollVert>>3);
for (int row = 0; row < OLED_COLS; row++) {
SPI.transfer(Matrix[row+scrollHorz].b[colScrolled]);
}
}
digitalWrite(OLED_CS, HIGH);
}
void randomiseMatrix() {
//Set up initial cells in matrix
randomSeed(analogRead(0));
for (int row = 0; row < MATRIX_COLS; row++) {
for (int col = 0; col < MATRIX_ROWS; col++) {
Matrix[row].b[col] = random(0xff);
}
}
}
void injectGlider() {
int col = random(MATRIX_COLS);
int row = random(MATRIX_ROWS);
Matrix[col++].b[row] |= 0b0000111;
Matrix[col++].b[row] |= 0b0000001;
Matrix[col++].b[row] |= 0b0000010;
}
void rotateLeft(unsigned long long x[]) {
unsigned long long c = 0;
for (int i=0; i<4; i++) {
unsigned long long c2 = x[i] >> 63;
x[i] = x[i] << 1 | c;
c = c2;
}
x[0] |= c;
}
void rotateRight(unsigned long long x[]) {
unsigned long long c = 0;
for (int i=3; i>=0; i--) {
unsigned long long c2 = x[i] << 63;
x[i] = x[i] >> 1 | c;
c = c2;
}
x[3] |= c;
}
int generateMatrix() {
//Variables holding data on neighbouring cells
MatrixData NeighbourN, NeighbourNW, NeighbourNE, CurrCells, NeighbourW, NeighbourE, NeighbourS, NeighbourSW, NeighbourSE;
//Variables used in calculating new cells
unsigned long long tot1, carry, tot2, tot4, NewCells;
int changes = 0; // counts the changes in the matrix
static int prevChanges[4]; // counts the changes in the matrix on prev 4 generations
static int staleCount = 0; // counts the consecutive occurrances of the same number of changes in the matrix
//set up N, NW, NE, W & E neighbour data
NeighbourN = Matrix[MATRIX_COLS-1];
CurrCells = Matrix[0];
Matrix[MATRIX_COLS] = CurrCells; // copy row 0 to location after last row to remove need for wrap-around code in the loop
NeighbourNW = NeighbourN;
rotateLeft(NeighbourNW.l);
NeighbourNE = NeighbourN;
rotateRight(NeighbourNE.l);
NeighbourW = CurrCells;
rotateLeft(NeighbourW.l);
NeighbourE = CurrCells;
rotateRight(NeighbourE.l);
//Process each row of the matrix
for (int row = 0; row < MATRIX_COLS; row++) {
//Pick up new S, SW & SE neighbours
NeighbourS = Matrix[row + 1];
NeighbourSW = NeighbourS;
rotateLeft(NeighbourSW.l);
NeighbourSE = NeighbourS;
rotateRight(NeighbourSE.l);
for (int i=0; i3 neighbours, cell dies
// =2 neighbours, cell continues to live
// =3 neighbours, new cell born
NewCells = (CurrCells.l[i] | tot1) & tot2 & ~ tot4;
//Have any cells changed?
if (NewCells != CurrCells.l[i]) {
//Count the change for "stale" test
changes++;
Matrix[row].l[i] = NewCells;
}
}
//Current cells (before update), E , W, SE, SW and S neighbours become
//new N, NW, NE, E, W neighbours and current cells for next loop
NeighbourN = CurrCells;
NeighbourNW = NeighbourW;
NeighbourNE = NeighbourE;
NeighbourE = NeighbourSE;
NeighbourW = NeighbourSW;
CurrCells = NeighbourS;
}
if (changes != prevChanges[0] && changes != prevChanges[1] && changes != prevChanges[2] && changes != prevChanges[3]) {
staleCount = 0;
}
else {
staleCount++; //Detect "stale" matrix
}
if (staleCount > 64) injectGlider(); //Inject a glider
//Serial.println(changes);
for (int i=3; i>0; i--) {
prevChanges[i] = prevChanges[i-1];
}
prevChanges[0] = changes;
}
Paulrb
Сб, 04 июля 2015 г., 18:33
И теперь мини -джойстик удаляется, и вид автоматически панонент вокруг сетки, чтобы показать часть, где происходит что -то интересное.
Видео
Код:
Видео
Код:
// Conway's Game Of Life 256x256
// PaulRB
// Jun 2015
#include
//Pins controlling SSD1306 Graphic OLED
#define OLED_DC 1
#define OLED_CS 0
#define OLED_RESET 2
#define OLED_COLS 128
#define OLED_ROWS 8
#define MATRIX_COLS 256
#define MATRIX_ROWS 32
union MatrixData {
unsigned long long l[MATRIX_ROWS/8];
byte b[MATRIX_ROWS];
};
MatrixData Matrix[MATRIX_COLS+1]; // Cell data in ram
int leftChanges, rightChanges, topChanges, bottomChanges;
void setup() {
byte startupCodes[] = {
0xAE, // Display off
0xD5, // Set display clock divider
0x80,
0xA8, // Set multiplex
0x3F,
0xD3, // Set display offset
0x00,
0x40, // Set start line to zero
0x8D, // Set charge pump
0x14,
0x20, // Set memory mode
0x00,
0xA1, // Set segment remapping
0xC8, // Set command Scan decode
0xDA, // Set Comm pins
0x12,
0x81, // Set contrast
0xCF,
0xd9, // Set precharge
0xF1,
0xDB, // Set Vcom detect
0x40,
0xA4, // Allow display resume
0xA6, // Set normal display
0xAF // Display On
};
pinMode(OLED_DC, OUTPUT);
pinMode(OLED_CS, OUTPUT);
pinMode(OLED_RESET, OUTPUT);
SPI.begin();
SPI.setBitOrder(MSBFIRST); // Set the SPI bit order
SPI.setDataMode(SPI_MODE0); //Set the SPI data mode 0
SPI.setClockDivider(SPI_CLOCK_DIV2); // 2.25 MHz
digitalWrite(OLED_RESET, HIGH);
delay(1);
digitalWrite(OLED_RESET, LOW);
delay(10);
digitalWrite(OLED_RESET, HIGH);
digitalWrite(OLED_DC, LOW);
digitalWrite(OLED_CS, LOW);
for (int i = 0; i < sizeof(startupCodes); i++) SPI.transfer(startupCodes[i]);
digitalWrite(OLED_CS, HIGH);
//R-pentomino
//Matrix[64].l[4] = 0b0000010;
//Matrix[65].l[4] = 0b0000111;
//Matrix[66].l[4] = 0b0000100;
//injectGlider();
//Gosper's Glider Gun
//Matrix[64].l[4] = 0b00000000000000000000000000010000000000000000000000;
//Matrix[65].l[4] = 0b00000000000000000000000001010000000000000000000000;
//Matrix[66].l[4] = 0b00000000000000011000000110000000000001100000000000;
//Matrix[67].l[4] = 0b00000000000000100010000110000000000001100000000000;
//Matrix[68].l[4] = 0b00011000000001000001000110000000000000000000000000;
//Matrix[69].l[4] = 0b00011000000001000101100001010000000000000000000000;
//Matrix[70].l[4] = 0b00000000000001000001000000010000000000000000000000;
//Matrix[71].l[4] = 0b00000000000000100010000000000000000000000000000000;
//Matrix[72].l[4] = 0b00000000000000011000000000000000000000000000000000;
randomiseMatrix();
outputMatrix();
//Serial.begin(115200);
//pinMode(SW_U, INPUT_PULLUP);
//pinMode(SW_D, INPUT_PULLUP);
//pinMode(SW_L, INPUT_PULLUP);
//pinMode(SW_R, INPUT_PULLUP);
//pinMode(SW_C, INPUT_PULLUP);
}
void loop() {
unsigned long start = millis();
for (int i=0; i<1000; i++) {
generateMatrix();
if (leftChanges - rightChanges > 16) scrollRight();
if (rightChanges - leftChanges > 16) scrollLeft();
if (bottomChanges - topChanges > 16) scrollDown();
if (topChanges - bottomChanges > 16) scrollUp();
outputMatrix();
}
//Serial.print("Gens/s:"); Serial.println(1000000UL/(millis() - start));
}
void outputMatrix() {
digitalWrite(OLED_DC, LOW); //Command mode
digitalWrite(OLED_CS, LOW); //Enable display on SPI bus
SPI.transfer(0x21); // Set column address
SPI.transfer(0);
SPI.transfer(OLED_COLS-1);
SPI.transfer(0x22); // Set page address
SPI.transfer(0);
SPI.transfer(OLED_ROWS-1);
digitalWrite(OLED_CS, HIGH); //Disable display on SPI bus
digitalWrite(OLED_DC, HIGH); // Data mode
digitalWrite(OLED_CS, LOW); //Enable display on SPI bus
//Send matrix data for display on OLED
for (int col = MATRIX_ROWS/2 - OLED_ROWS/2; col < MATRIX_ROWS/2 + OLED_ROWS/2; col++) {
for (int row = MATRIX_COLS/2 - OLED_COLS/2; row < MATRIX_COLS/2 + OLED_COLS/2; row++) {
SPI.transfer(Matrix[row].b[col]);
}
}
digitalWrite(OLED_CS, HIGH);
}
void randomiseMatrix() {
//Set up initial cells in matrix
randomSeed(analogRead(0));
for (int row = 0; row < MATRIX_COLS; row++) {
for (int col = 0; col < MATRIX_ROWS; col++) {
Matrix[row].b[col] = random(0xff);
}
}
}
void injectGlider() {
int col = random(MATRIX_COLS);
int row = random(MATRIX_ROWS);
Matrix[col++].b[row] |= 0b0000111;
Matrix[col++].b[row] |= 0b0000001;
Matrix[col++].b[row] |= 0b0000010;
}
void rotateLeft(unsigned long long x[]) {
unsigned long long carryIn = 0, carryOut;
for (int i=0; i<4; i++) {
carryOut = x[i] >> 63;
x[i] = x[i] << 1 | carryIn;
carryIn = carryOut;
}
x[0] |= carryOut;
}
void rotateRight(unsigned long long x[]) {
unsigned long long carryIn = 0, carryOut;
for (int i=3; i>=0; i--) {
carryOut = x[i] << 63;
x[i] = x[i] >> 1 | carryIn;
carryIn = carryOut;
}
x[3] |= carryOut;
}
void scrollLeft() {
Matrix[MATRIX_COLS] = Matrix[0];
for (int row = 0; row < MATRIX_COLS+1; row++) Matrix[row] = Matrix[row+1];
}
void scrollRight() {
for (int row = MATRIX_COLS; row > 0; row--) Matrix[row] = Matrix[row-1];
Matrix[0] = Matrix[MATRIX_COLS];
}
void scrollUp() {
for (int row = 0; row < MATRIX_COLS; row++) rotateLeft(Matrix[row].l);
}
void scrollDown() {
for (int row = 0; row < MATRIX_COLS; row++) rotateRight(Matrix[row].l);
}
int generateMatrix() {
//Variables holding data on neighbouring cells
MatrixData NeighbourN, NeighbourNW, NeighbourNE, CurrCells, NeighbourW, NeighbourE, NeighbourS, NeighbourSW, NeighbourSE;
//Variables used in calculating new cells
unsigned long long tot1, carry, tot2, tot4, NewCells;
int changes = 0; // counts the changes in the matrix
static int prevChanges[4]; // counts the changes in the matrix on prev 4 generations
static int staleCount = 0; // counts the consecutive occurrances of the same number of changes in the matrix
leftChanges = rightChanges = topChanges = bottomChanges = 0;
//set up N, NW, NE, W & E neighbour data
NeighbourN = Matrix[MATRIX_COLS-1];
CurrCells = Matrix[0];
Matrix[MATRIX_COLS] = CurrCells; // copy row 0 to location after last row to remove need for wrap-around code in the loop
NeighbourNW = NeighbourN;
rotateLeft(NeighbourNW.l);
NeighbourNE = NeighbourN;
rotateRight(NeighbourNE.l);
NeighbourW = CurrCells;
rotateLeft(NeighbourW.l);
NeighbourE = CurrCells;
rotateRight(NeighbourE.l);
//Process each row of the matrix
for (int row = 0; row < MATRIX_COLS; row++) {
//Pick up new S, SW & SE neighbours
NeighbourS = Matrix[row + 1];
NeighbourSW = NeighbourS;
rotateLeft(NeighbourSW.l);
NeighbourSE = NeighbourS;
rotateRight(NeighbourSE.l);
for (int i=0; i3 neighbours, cell dies
// =2 neighbours, cell continues to live
// =3 neighbours, new cell born
NewCells = (CurrCells.l[i] | tot1) & tot2 & ~ tot4;
//Have any cells changed?
if (NewCells != CurrCells.l[i]) {
//Count the change for "stale" test
changes++;
if (row >= MATRIX_COLS/2) rightChanges++; else leftChanges++;
if (i >= MATRIX_ROWS/16) bottomChanges++; else topChanges++;
Matrix[row].l[i] = NewCells;
}
}
//Current cells (before update), E , W, SE, SW and S neighbours become
//new N, NW, NE, E, W neighbours and current cells for next loop
NeighbourN = CurrCells;
NeighbourNW = NeighbourW;
NeighbourNE = NeighbourE;
NeighbourE = NeighbourSE;
NeighbourW = NeighbourSW;
CurrCells = NeighbourS;
}
if (changes != prevChanges[0] && changes != prevChanges[1] && changes != prevChanges[2] && changes != prevChanges[3]) {
staleCount = 0;
}
else {
staleCount++; //Detect "stale" matrix
}
if (staleCount > 64) injectGlider(); //Inject a glider
for (int i=3; i>0; i--) {
prevChanges[i] = prevChanges[i-1];
}
prevChanges[0] = changes;
}
Rogerclark
Сб, 04 июля 2015 г., 21:42
Пол
Выглядит очень круто.
Вы поняли свою ошибку с аварией?
Кроме того, в ваших комментариях YourTube,
Можете ли вы ссылаться на мои видео на YouTube о том, как вы устанавливаете, а также на репо и этот форум?
Вы можете попробовать один из этих цветных дисплеев на основе SPI, например, ILI9341 (хотя это может быть немного медленнее, если вы не можете использовать DMA для выполнения передач)
Выглядит очень круто.
Вы поняли свою ошибку с аварией?
Кроме того, в ваших комментариях YourTube,
Можете ли вы ссылаться на мои видео на YouTube о том, как вы устанавливаете, а также на репо и этот форум?
Вы можете попробовать один из этих цветных дисплеев на основе SPI, например, ILI9341 (хотя это может быть немного медленнее, если вы не можете использовать DMA для выполнения передач)
Paulrb
Солнце 5 июля 2015 г., 16:25
Привет, Роджер, ссылки добавлены на видео на YouTube.
Не знаю, есть ли у меня проблема с пульсированием/аварией, оставив эскиз за несколько часов и посмотрит, что произойдет. Может быть, даже небольшие изменения могут вызвать/избежать проблемы.
Спасибо, что все это произошло на Arduino Ide, кстати, кстати!
Не знаю, есть ли у меня проблема с пульсированием/аварией, оставив эскиз за несколько часов и посмотрит, что произойдет. Может быть, даже небольшие изменения могут вызвать/избежать проблемы.
Спасибо, что все это произошло на Arduino Ide, кстати, кстати!
Rogerclark
Солнце 5 июля 2015 г. 9:06 вечера
Привет, Пол
Если у вас все еще есть проблема с синим пульсированием, дайте мне знать, и я посмотрю, смогу ли я воспроизвести его, а затем попробуйте бежать с адаптером Stlink и GDB, бегающим, чтобы увидеть, сможет ли он пролить свет на то, почему его сбой
Если у вас все еще есть проблема с синим пульсированием, дайте мне знать, и я посмотрю, смогу ли я воспроизвести его, а затем попробуйте бежать с адаптером Stlink и GDB, бегающим, чтобы увидеть, сможет ли он пролить свет на то, почему его сбой
Mrburnette
Солнце 5 июля 2015 г., 22:28
Paulrb написал:И теперь мини -джойстик удаляется, и вид автоматически панонент вокруг сетки, чтобы показать часть, где происходит что -то интересное.
Видео
Видео
Paulrb
Пн, 6 июля 2015 г. 5:57 утра
Спасибо, Рэй. Ты помнишь мои ранние попытки на Пикакс? Около 10 кадров в секунду на сетке 16 x16...
Роджер, вчера непрерывно запускал код более 3 часов без сбоя/синего пульсации. Понятия не имею, что я сделал, чтобы исправить это, к сожалению. Если он запустится снова, попытаюсь изолировать то, что я изменил, что вызывает это, хотя, если это происходит только через несколько часов, я, вероятно, пропустит это.
Роджер, вчера непрерывно запускал код более 3 часов без сбоя/синего пульсации. Понятия не имею, что я сделал, чтобы исправить это, к сожалению. Если он запустится снова, попытаюсь изолировать то, что я изменил, что вызывает это, хотя, если это происходит только через несколько часов, я, вероятно, пропустит это.
Rogerclark
Пн, 6 июля 2015 г., 6:23
Пол
Интересно, может ли свободное соединение с дисплеем (не совсем уверен, как)
В любом случае. Там нет способа отладить его, если мы не сможем воспроизвести ошибку
Где я слышал это раньше.....
Интересно, может ли свободное соединение с дисплеем (не совсем уверен, как)
В любом случае. Там нет способа отладить его, если мы не сможем воспроизвести ошибку
Где я слышал это раньше.....
Mrburnette
Пн, 6 июля 2015 12:12
Paulrb написал:Спасибо, Рэй. Ты помнишь мои ранние попытки на Пикакс? Около 10 кадров в секунду на сетке 16 x16...